Como parte de los resultados de investigación obtenidos en el desarrollo de la tesis doctoral que actualmente el Doctorando Miguel Realpe realiza en la Universidad de Griffith en Australia, recientemente ha publicado el artículo: “Towards Fault Tolerant Perception for autonomous vehicles: Local Fusion”, dentro de la temática de vehículos autónomos.
El articulo ha sido aceptado para ser publicado en 7th IEEE International Conference on Robotics, Automation and Mechatronics (RAM) que se efectuará en Julio de 2015 (www.cis-ram.org/2015/).
Este artículo describe los módulos de detección de objetos propuestos para un sistema de percepción en vehículos autónomos, dentro de un marco de tolerancia a fallos que realiza una fusión sensorial en dos etapas (filtros locales y filtro global). El objetivo del artículo es probar la factibilidad de utilizar este tipo de arquitectura junto a una combinación de algoritmos simples de detección de objetos para lograr la modularidad, interoperabilidad y ejecución en tiempo real requerida por los sistemas de percepción en vehículos autónomos.
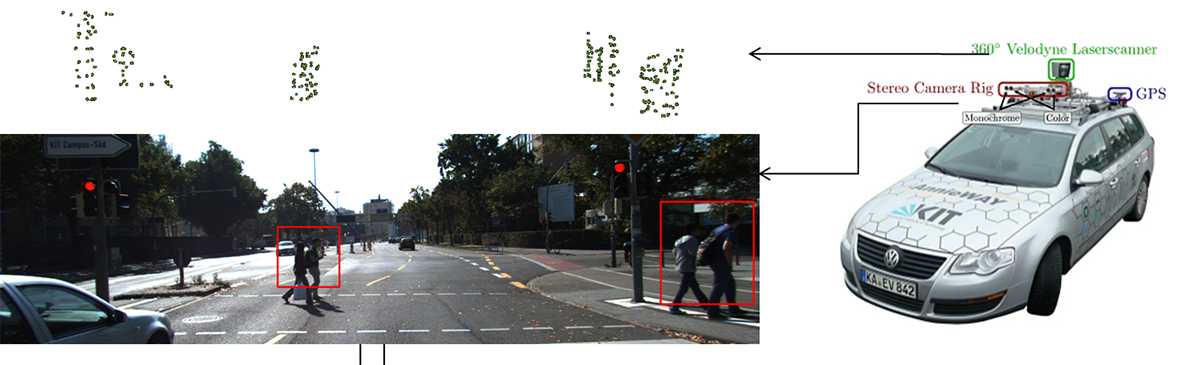
Para las pruebas experimentales se utiliza la base de datos de pruebas "KITTI" adquirida por el vehículo autónomo Annieway, que incluye un sensor laser Velodyne y dos conjuntos de cámaras de visión estéreo. La fusión sensorial realizada por los filtros locales presentan una ejecución en tiempo real con errores en la detección de 8.98% y un 2.48% falsos positivos que corresponden a objetos estáticos y que pueden ser corregidos posteriormente en el filtro global.
En el artículo se determina que los módulos de detección de objetos y los filtros locales implementados cumplen los requisitos necesarios para el sistema de percepción, sin embargo la integración del filtro global aún se encuentra en proceso de desarrollo.
Para descargar la publicación click aquí
Share this: